
arXivに掲載された論文「Vega: Learning to Drive with Natural Language Instructions」は、自然言語の指示を直接学習に活用する自動運転システムを提案している。運転の様式(「安全運転を優先して」「なるべく速く移動して」)を言語で指定できる新アーキテクチャは、自動運転の個人化という新しい方向性を示している。
従来の自動運転の限界
従来の自動運転システムは、主に「安全に目的地に到達する」という単一の目標に最適化される傾向があった。しかし現実には、同じ道路でも朝の通勤では「時間を守ること」を、休日のドライブでは「快適さ」を優先したいというように、状況や個人の好みによって望ましい走行スタイルは異なる。

また、特定のシナリオでの対応方針(「学校前では特に慎重に」「高速では燃費優先で」)を個々に学習させるには、大量のデモンストレーションデータが必要だった。これが個人化された自動運転の実現を妨げる技術的障壁となっていた。数値パラメータによる調整は専門知識を要し、一般ユーザーが自分の好みを自動運転システムに伝えることを困難にしていた。
Vegaのアプローチ
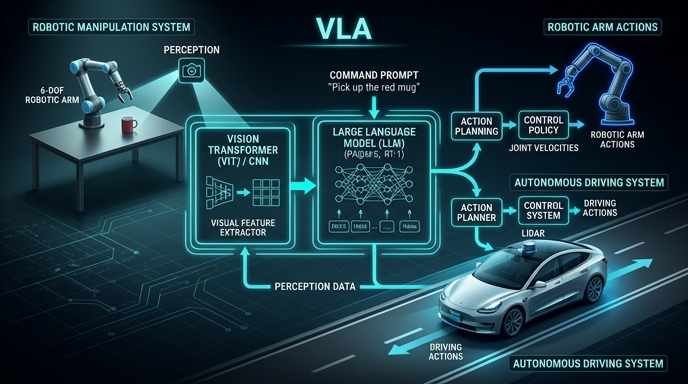
Vegaは大規模言語モデル(LLM)をベースとしたVision-Language-Action(VLA)アーキテクチャを採用する。視覚入力(カメラ映像)と言語入力(自然言語による走行指示)を統合し、直接的な操作コマンド(ハンドル角度、アクセル・ブレーキ量)を出力する。
重要な特徴は、走行スタイルの指定を自然言語で行える点だ。「高齢者が同乗しているため穏やかに走って」「急いでいるが法令は遵守して」といった複合的な指示を理解し、適切な走行パラメータに変換する。これは従来の数値パラメータによる調整とは根本的に異なるインターフェースだ。
VLAアーキテクチャとロボティクス研究の文脈
VegaのVLA(Vision-Language-Action)アーキテクチャは、2026年に急速に発展するロボティクス研究の文脈で理解する必要がある。具身AI競争が転換期を迎える中、Physical IntelligenceやDeepMindが推進するVLAモデルは、言語指示を物理行動に直接変換する共通の方向性を持つ。自動運転もロボティクスも、「自然言語でタスクを与えると適切な物理アクションが生成される」という同じ問題構造を持っている。
同様の文脈で、HeiSD論文が示したロボット制御VLAモデルの推論高速化(350ms→138ms、2.8倍)は自動運転にも直接の示唆を持つ。リアルタイム制御が要求される自動運転では、VLAモデルの推論遅延が安全性に直結する。Vegaが言語理解の精度を追求するのと並行して、HeiSDが解決した推論速度の問題は自動運転への応用においても避けられない課題だ。運動学的知識を活用した推測デコードの手法は、自動運転の制御精度を維持しながら遅延を削減するアプローチとして注目に値する。
技術的な貢献
論文の主要な技術的貢献は三点ある。第一に、自然言語と走行行動の対応付けを学習するデータセットとトレーニングパイプラインの構築。第二に、言語理解と視覚的な場面認識を統合したEnd-to-Endのモデルアーキテクチャ。第三に、個人の走行嗜好をプロファイルとして保存し、ゼロショットで新しいドライバーの好みに適応する手法だ。
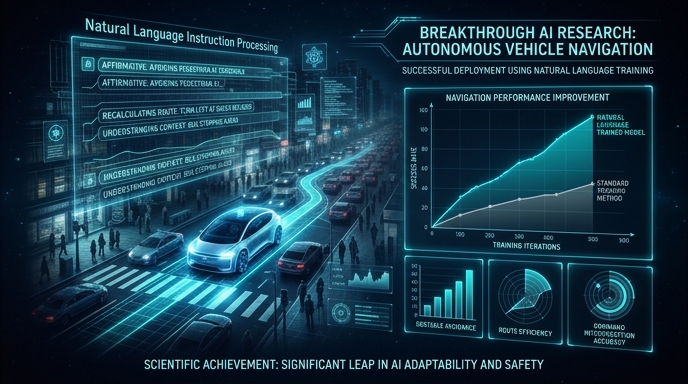
実験では、CARLA(自動運転シミュレーター)上でのベンチマークにおいて、言語指示なしの従来ベースラインと比較して、指定した走行スタイルへの適合度が大幅に向上したことが示されている。自然言語エージェントのハーネス設計パターンに関する研究が示すように、言語入力をアクションに変換するシステム設計では「言語の曖昧性をどう扱うか」「コンテキストをどう保持するか」が設計上の核心問題となる。Vegaはこの問題を自動運転という高リスク・リアルタイム要求のドメインで解こうとしている点が特筆される。
今後の課題と可能性
自然言語による自動運転の制御は魅力的だが、いくつかの課題も残る。言語の曖昧性(「もっと慎重に」が何を意味するかは文脈依存)、実世界での安全性検証、法的責任の所在(AIが言語指示を誤解した場合)などだ。
しかし長期的には、個人の走行スタイルをプロファイルとして保持し、ユーザーとAIドライバーの間に自然な対話が成立する自動運転システムへの可能性を示す先駆的研究として評価される。2026年の具身AI競争の中で、自動運転もVLAアーキテクチャへの収束という大きな流れの一部として位置づけられる。


